 :13828821506
:13828821506






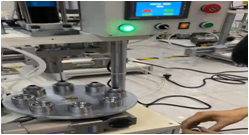
视觉分拣自动化设备

广泛用于各类工作无序状态的上下料、分拣、拆码垛、装配等场景,具有精度高、速度快,布置快速,维护方便的特点。
通过3D视觉精准识别产品的尺寸大小、位置姿态,机器人路径规划技术,实现不同尺寸货物自动码垛,不再需要依据每个不同的品类去做机器人的编程工作,真正实现:看见即规划。应用于工厂流水线包装码垛环节,针对来料的货物尺寸动态未知下的应用。
详细介绍:
多品类、不同尺寸的包装通过输送带来料是码垛流程的常见方式 ,而如何实现不需要对机器人编程就可以实现自动码垛过程呢?
背景:许多电商或者医药行业拆垛时,经常会遇到有些垛已经不完整,且不同垛的包装尺寸也不一样。
难点:垛形不完整,上层有可能只有一两箱包裹且不是规则摆放。包装箱也有不同尺寸。
解决方案:通过悟空3D传感器采集三维图像信息,利用3D智能软件可以兼容各种尺寸的包装,也可以兼容不完全规则的垛形。通过优化计算引导工业机械人进行拆垛。
专业针对散乱无序堆放的工件设计,可协助机器人实现3D智能抓取。通过对工件3D数据扫描以实现三维准确定位,引导机械手准确抓取定位工件,实现了工业机器人自动化生产线的柔性工装。
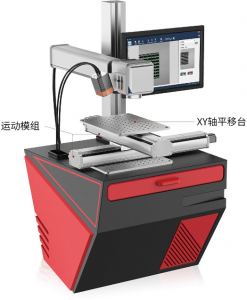
技术原理:
通过高速、精确的3D结构光成像系统,对物体表面轮廓进行扫描,形成点云数据;并对点云数据进行智能分析处理,加以AI算法、机器人路径自动规划、自动防碰撞等智能化技术;计算出当前工件实时空间坐标,并引导机器人完成自动抓取任务。协助机器人集成商快速完成3D定位方案。
解决方案:
通过机器人3D定位系统,引导机器人抓取曲轴并根据三维特征定点放置
通过3D视觉方案实现三维扫描定位
快速建立、更换数据模型(建模)满足小批量多品种的生产需求
智能分析工件抓取优先级,引导工业机器人快速精准抓取工件,有效解决上下层工件相互干扰的问题
客户收益:
系统结构简单、经济实用,有效降低生产成本和维护成本。
产线柔性高,不仅可以满足现有不同型号产品的生产,同时支持用户快速添加新的型号。
产品质量提升的同时将工人们从繁复的劳动中解放出来。
某快递公司的分拣中心,在进行包裹分拣时,快递员将收到的各种类的包裹(纸箱、邮件、软包)统一散乱堆放到分拣处,然后由人工逐个拾取放置到分拣输送带上。这种人工分拣方式效率低下,满足不了快递行业日益发展的快速要求。
技术分析:
方案要求实现无人化分拣流程
料框堆叠不同形状的袋装包装和盒包装无法用传统二维识别
包装形状各异,尺寸各异
人工拣选速度和质量受个人情绪等影响,极不稳定
人工 拣选多造成内部快件不确定损伤
解决方案:
通过机器人3D定位系统,引导机器人从包裹箱抓取包裹放置到传送带
通过3D视觉方案实现三维扫描定位
选用定制兼容型通用视野的产品型号
设用机器人设定抓取后扫描位置再放置到输送带
设定机器人轻拿轻放机制,确保拣选过程零损伤
必须是数字
不能为空
E-mail格式不对
手机号格式不对
不能为空
不能为空

- 上一篇:视觉定位打标
- 下一篇:在线式飞行激光打标机